Introduction
So, we want to break down our continuous-time sigma-delta feedback into two paths:
- A low-precision tight loop that delivers the first sample to the quantizer
- A higher-precision loop that goes through a clock delay to minimize “metastability” (indecision)
DAC Feedback
As a small aside, recall that the DAC feedback looks similar to the following:
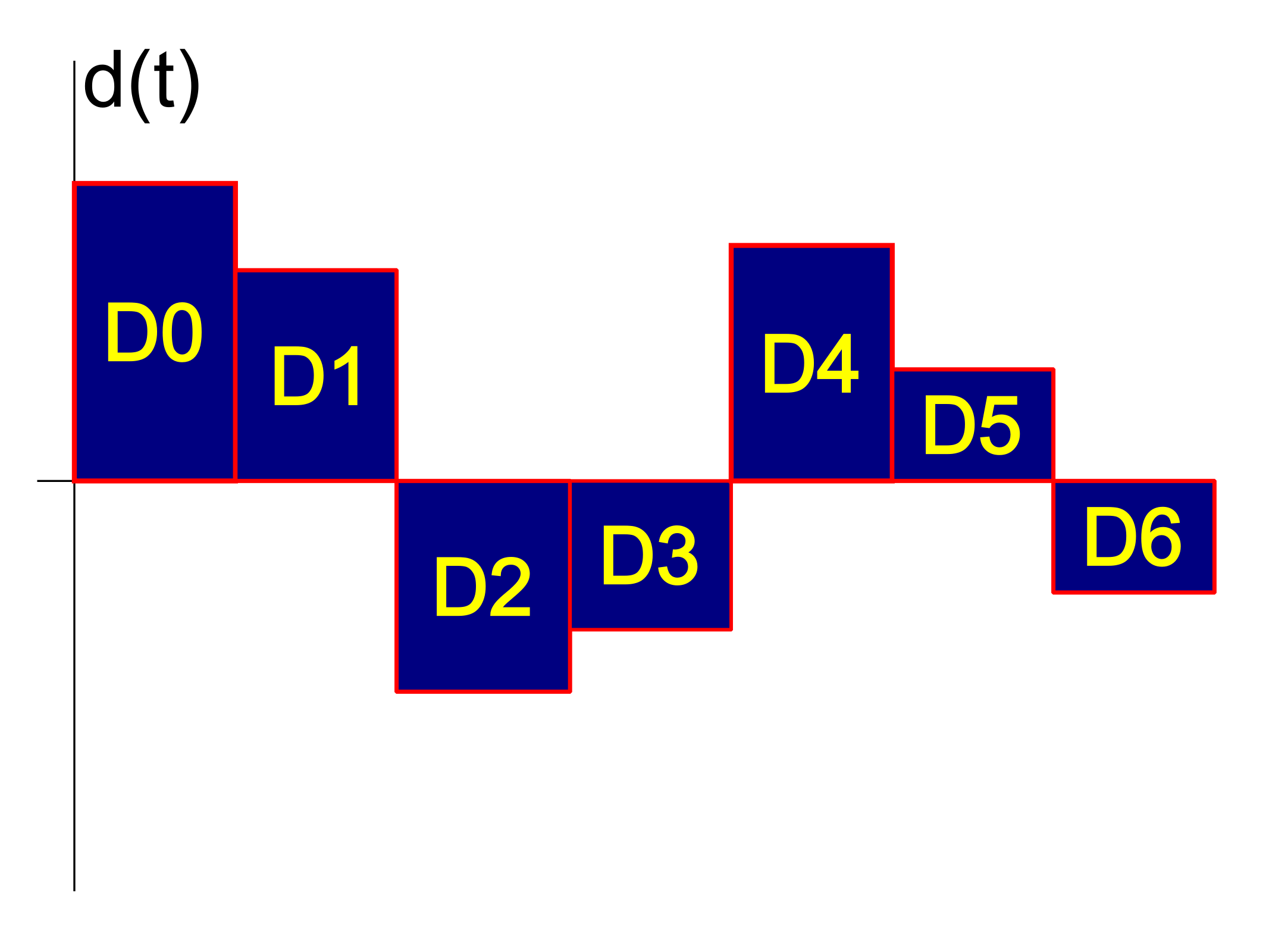
The input to the quantizer is the convolution of this signal with the impulse response h(t) of the noise-shaping filter H(s). As we did with the impulse-invariant transform, we break down the noise-shaping filter into partial-fraction expansion:
$$H(s) = \sum_{k} F_{k}(s) = \sum_{k} \frac{g_k}{s – p_k}$$
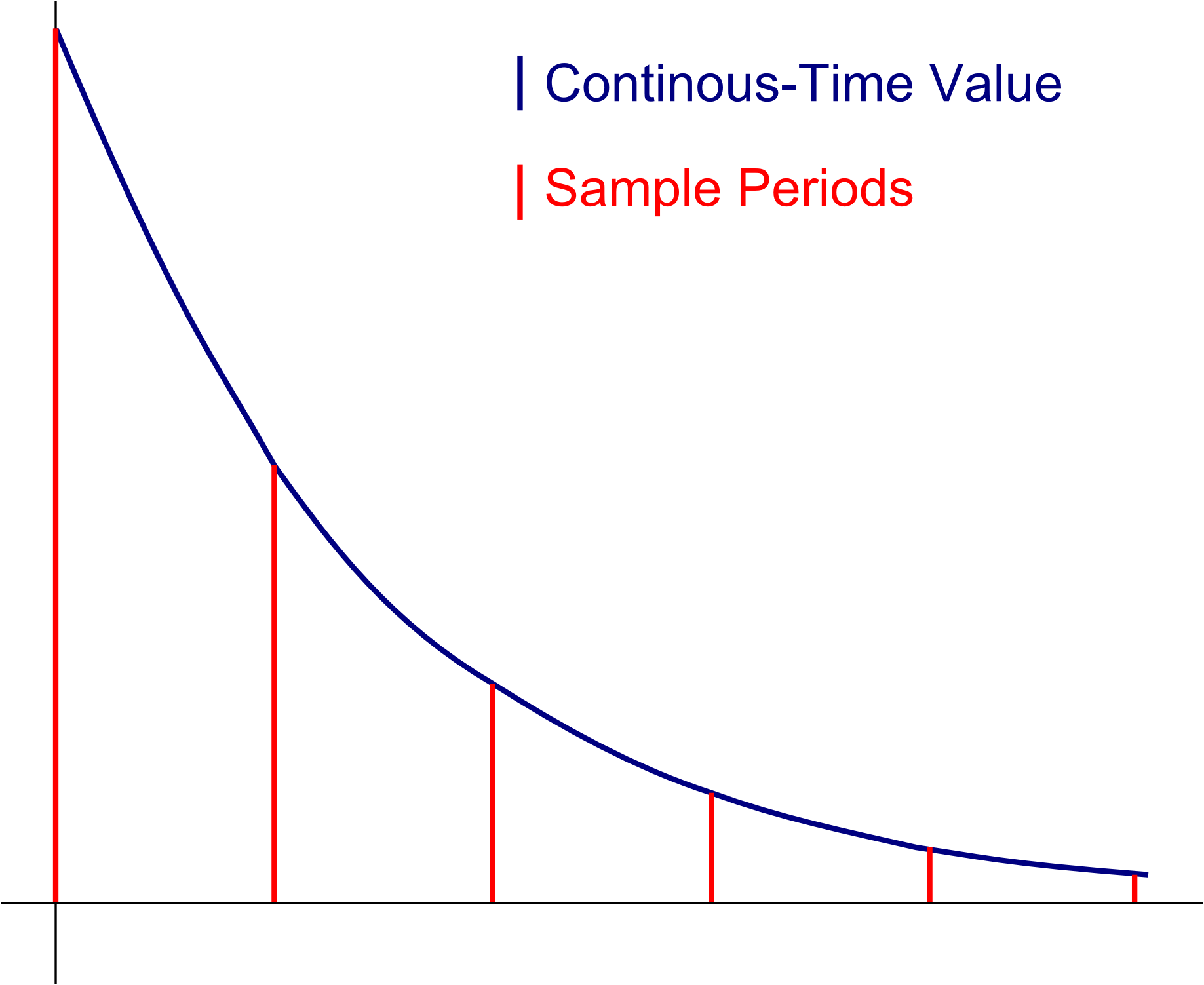
Each of these $F_{k}$ is a single-pole filter, with an impulse response that looks something like:
Dual-Filter Analysis
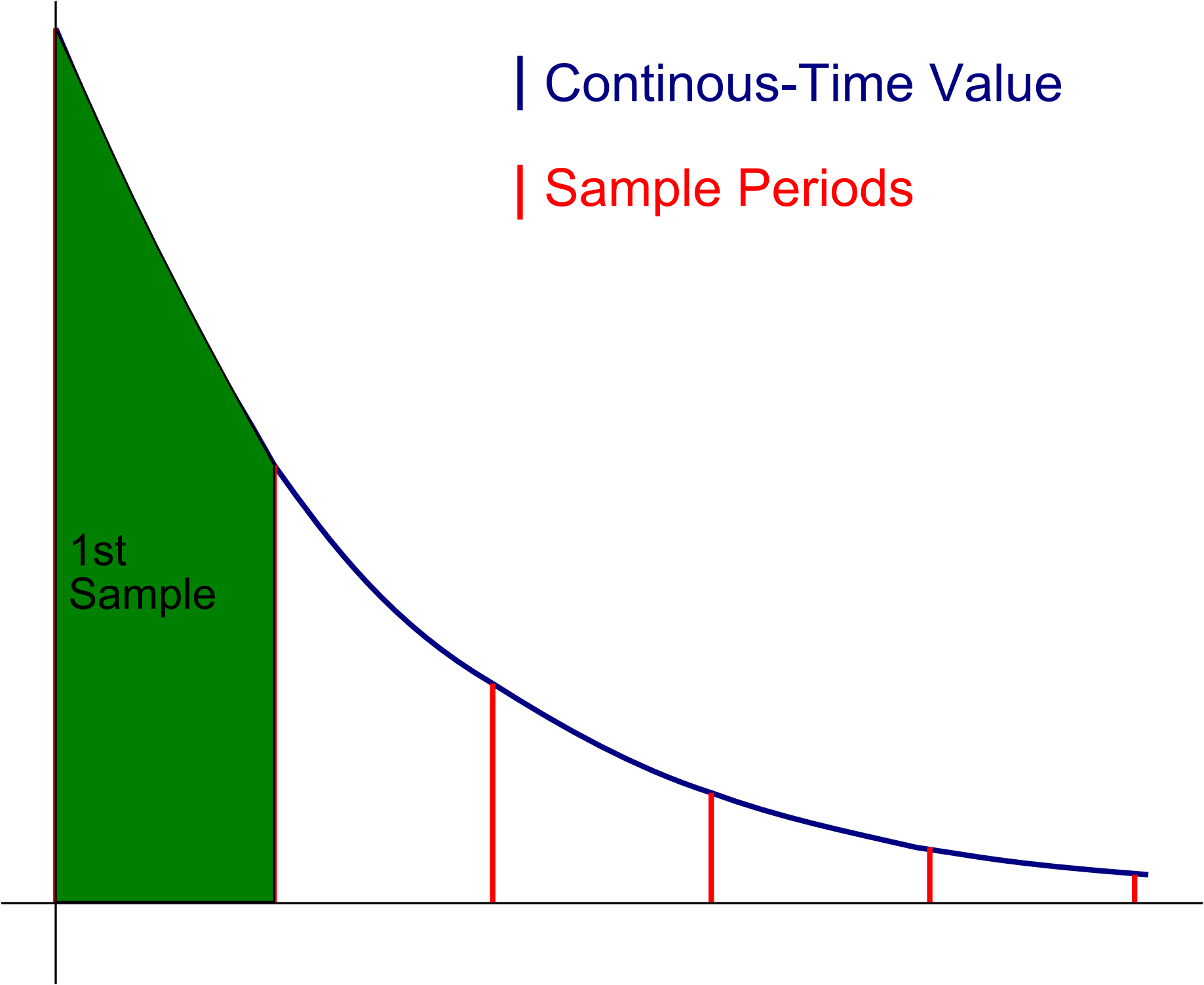
The first sample at the quantizer is the convolution of a DAC symbol with the impulse response. This amounts to the integral over one sample period:
The rest of the samples can be passed through a filter that looks like this:
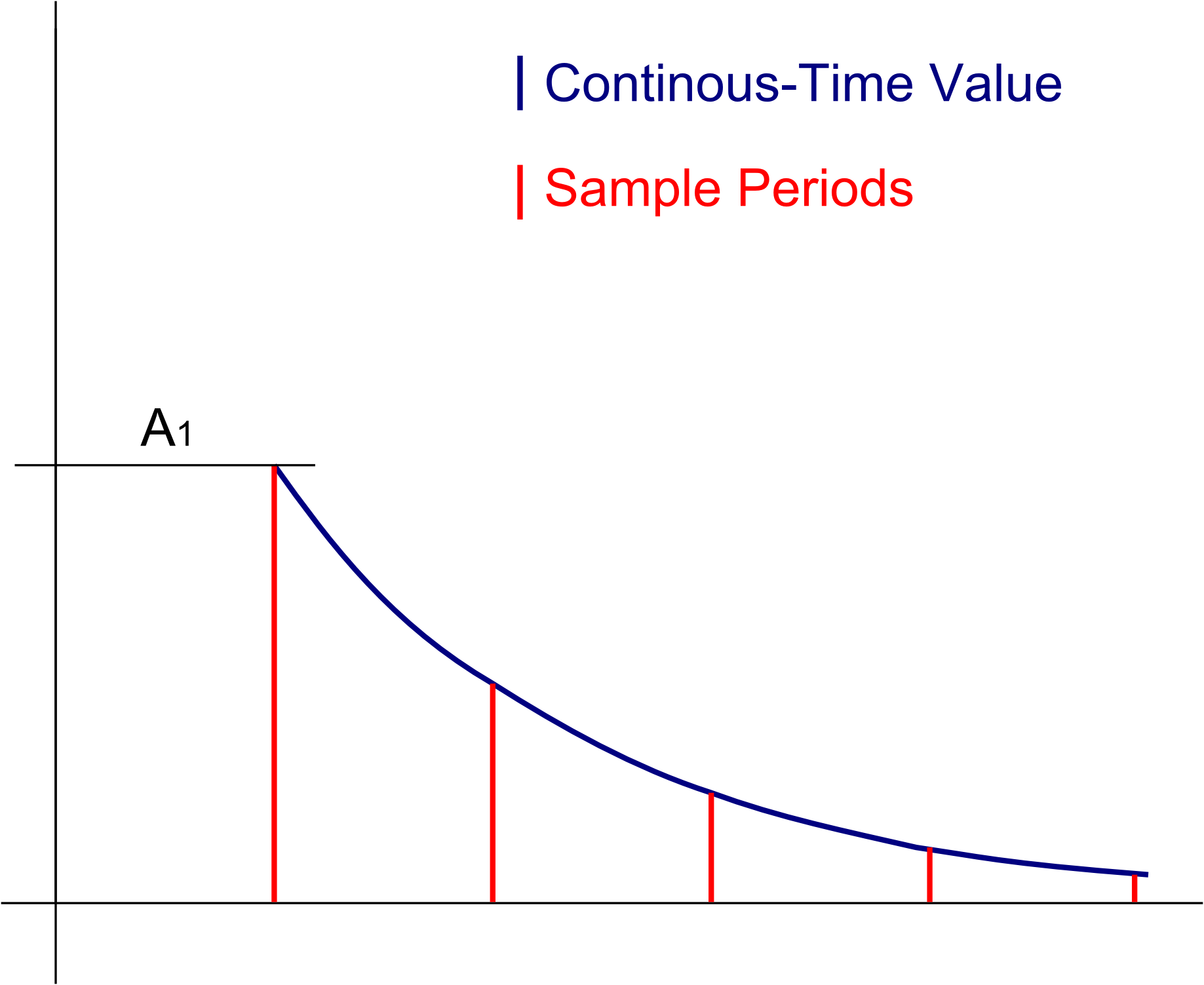
The main difference between this remaining filter and the original is that it is scaled by $A_{1} = e^{-p_{k}T_s}$. Note that the delay in the filter is already included in the system due to the extra clock delay by the second DAC.
Summary
So, in the end, we have replaced $H(s)$ with:
$$H'(s) = \sum_k e^{-p_{k}T_s}F_{k}(s)$$