Introduction
The impulse invariant transform (IIT) is a method of taking a continuous-time system H(s) and converting it to a discrete-time system. There are multiple ways of doing this, but the IIT does so with the constraint that the impulse response of the discrete-time system is a sampled version of the impulse response of the continuous-time system.
Here’s an illustration:
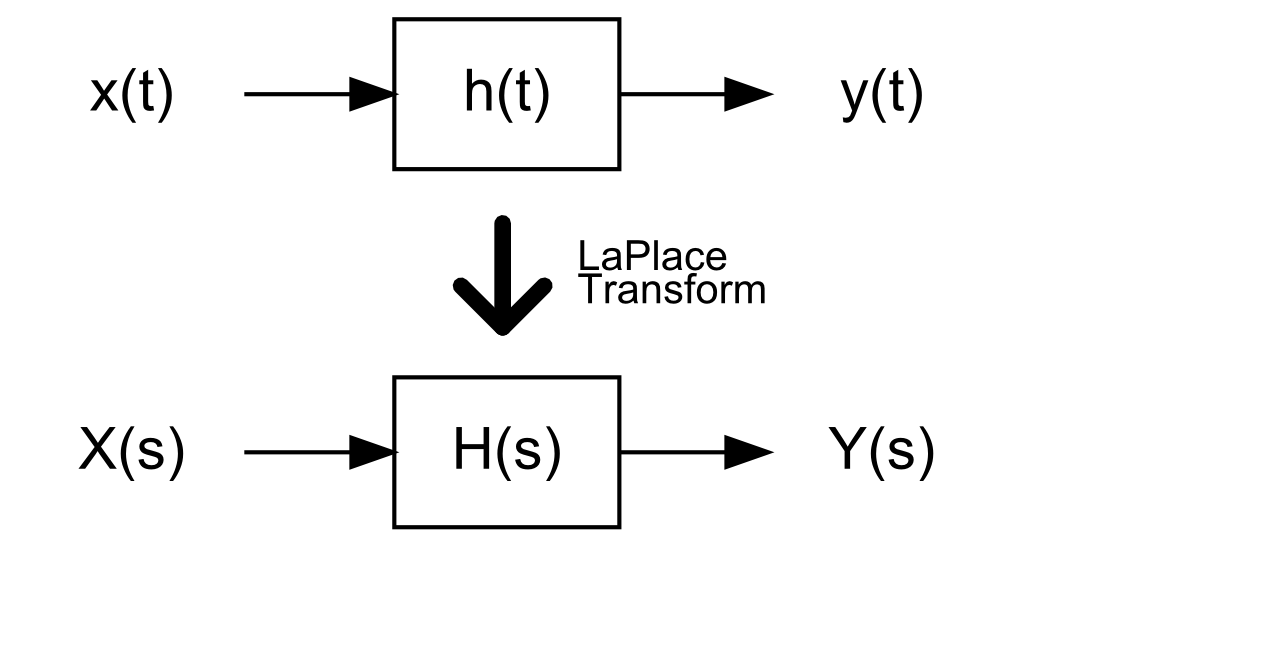
…gets converted to…
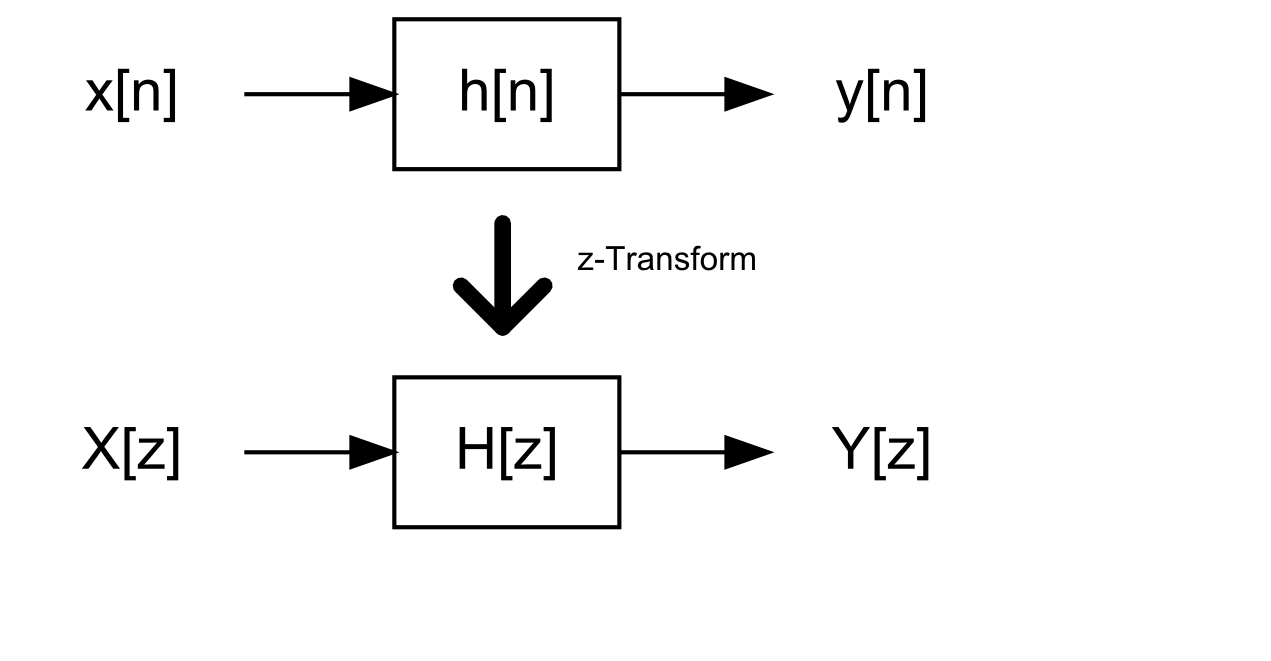
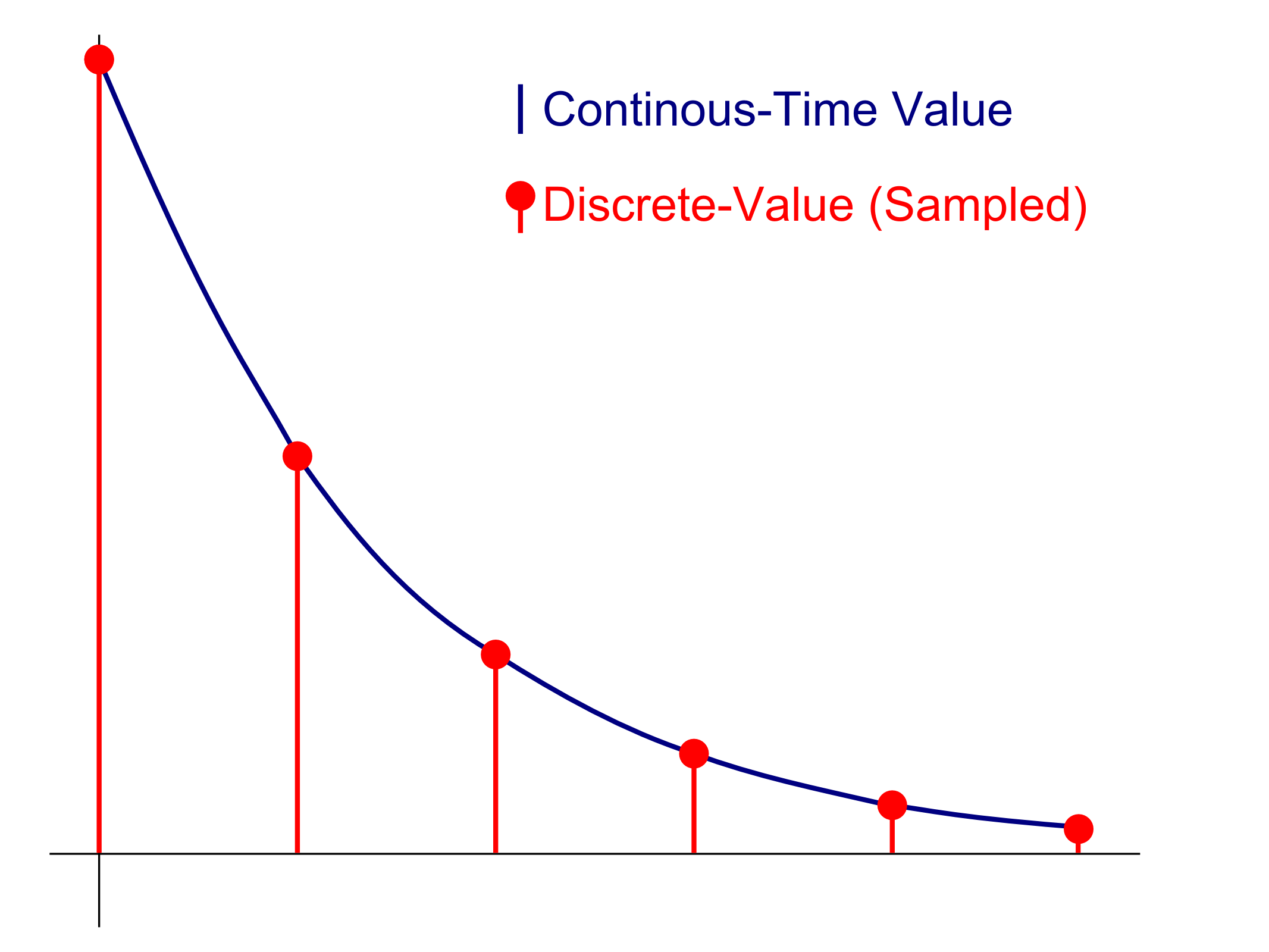
…with the characteristic that the discrete-time impulse response is a sampled version of the continuous-time:
Rational Systems
This doesn’t seem like a big deal—nor very accurate. The illustration above implies that we’re taking an IIR response from the continuous-time system and sampling as a discrete-time FIR.
However, the IIT actually does something better: if H(s) is rational (composed of a numerator and denominator):
$$H(s) = \frac{N_c(s)}{D_c(s)}$$
…then the IIT lets us re-write this system as a discrete-time rational system:
$$H[z] = \frac{N_d[z]}{D_d[z]}$$
…of course, with the property that $h[n] = T_s \times h(nT_s)$. $T_s$ is the sampling period (typically, during transformation from continous-time to discrete-time, the continuous-time impulse response is scaled by the sample period).
Example
Here’s an example:
$$H(s) = \frac{s}{s^2 + 1}$$
First, we break it down into its partial fraction expansion:
$$H(s) = \frac{s}{(s-j)(s+j)} = \frac{a}{s-j} + \frac{b}{s+j}$$
Solving (taking limits of s to +j and -j):
$$a = \frac{1}{2}$$
$$b = \frac{-1}{2}$$
Now, the IIT prescribes how to take single-pole transfer functions and convert them to the z-domain.
$$\frac{a}{s-j} \rightarrow \frac{T_s a}{1-e^{+jT_s}z^{-1}}$$
$$\frac{b}{s+j} \rightarrow \frac{T_s b}{1-e^{-jT_s}z^{-1}}$$
…which means that:
$$H[z] = \frac{T_s}{2(1-e^{+jT_s}z^{-1})} – \frac{T_s}{2(1-e^{-jT_s}z^{-1})}$$
$$H[z] = \frac{T_s cos(jT_s) z^{-1}}{1 – cos(jT_s)z^{-1} + z^{-2}}$$
Application
The impulse invariant transform is useful in modelling continuous-time sigma-delta, allowing one to analyze the mixed-mode continuous-time sigma-delta as a purely discrete-time system.
Most notably, in considering the stability of continuous-time sigma-delta ADC’s, the transformation is useful in allowing one to replace the continuous-time noise-shaping filter with a discrete-time equivalent. One could then perform a closed-loop analytic analysis on the system. This is the procedure advocated in Delta-Sigma Data Converters: Theory, Design, and Simulation. However, the book only prescribes a rule-of-thumb, and in general, one must simulate the sigma-delta rigorously to gain confidence of stability.
Arguably, this transformation was more useful in the past, when high-level mixed-mode simulators (Simulink) were not available. In that case, the only way to simulate the continous-time sigma-delta was to model at a discrete-time. Nowadays (in my experience) Simulink is fast enough that it’s easier to keep the mixed-mode nature of the system intact (i.e. not model it as a purely discrete-time system). However, I can imagine a case of either very long simulations or a regression analysis system where the cycle-accurate discrete-time model may become useful again.
Good Explanation. Thanks.
Can you also explain the sampling theorem funda which pops up in IIT (related to the primary and complimentary strips in the s domain when mapped into the z domain).